Inspirándose en la biología de las hormigas, científicos de la Universidad Técnica de Delft (TU Delft, Países Bajos) han creado ahora diminutos drones autónomos capaces de navegar por rutas interiores de hasta 100 metros. El avance ha sido publicado en la revista Science Robotics.
Los autores se basaron en descubrimientos biológicos sobre la forma en la que las hormigas reconocen visualmente su entorno y lo combinan con el recuento de sus pasos para volver sanas y salvas a casa.
El equipo dirigido por Tom van Dijk adaptó los métodos existentes para crear una estrategia bioinspirada que combina la odometría (medida de la distancia recorrida en una dirección concreta) y la localización visual, que guía la orientación en relación con puntos de referencia visuales del entorno.
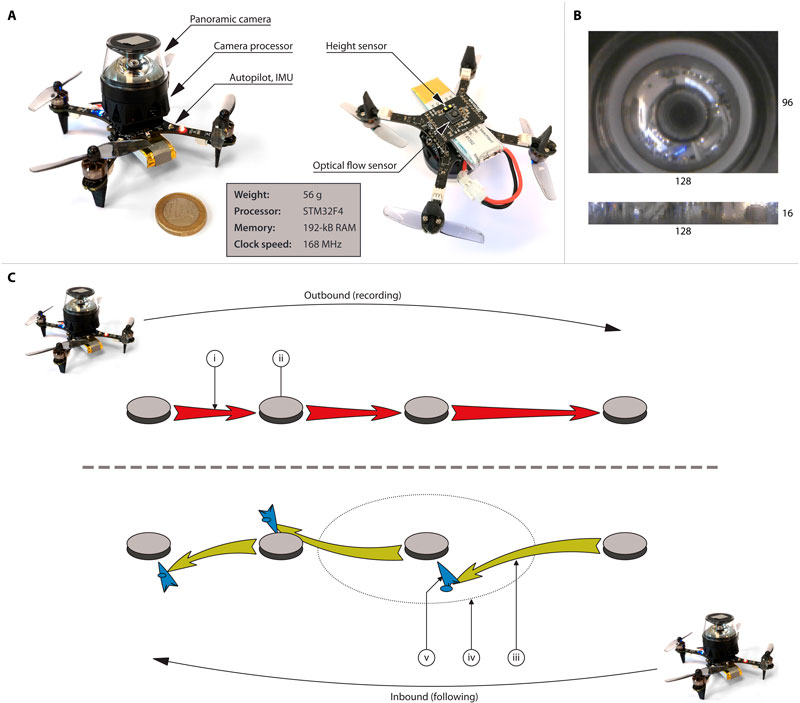
Los investigadores implementaron su método en un dron del modelo Crazyflie Brushless de 56 gramos equipado con una cámara panorámica, un microcontrolador y 192 kB de memoria, y lo probaron en diversos escenarios de interior.
El robot voló primero hacia un destino, tomando instantáneas de su entorno a intervalos regulares durante el trayecto. A la vuelta, utilizaba la localización visual para regresar por la misma ruta, comparando periódicamente su entorno actual con las instantáneas de los puntos de ruta para corregir el rumbo en caso de desvío.
La estrategia permite a estos pequeños drones volver a casa tras largas trayectorias y requiere muy pocos recursos de cálculo y memoria, pues las instantáneas se comprimían al máximo y se espaciaban lo más posible sin perder precisión.
Espaciar instantáneas
La idea principal que subyace a este método es que se pueden espaciar las instantáneas mucho más si el robot viaja entre ellas basándose en la odometría, señala Guido de Croon, otro de los autores.
En general, para orientarse en su entorno, la mayoría de los robots dependen de recursos externos, como el GPS o de algoritmos computacionalmente complejos. Sin embargo, estas opciones pueden resultar caras y poco fiables.
Además, los algoritmos basados en mapas pueden ser complejos desde el punto de vista computacional y consumir mucha memoria, lo que supone un reto para la navegación autónoma de robots pequeños con recursos limitados.
La idea que subyace al método es que se pueden espaciar las instantáneas mucho más si el robot viaja entre ellas basándose en la odometría (medir distancias recorridas en una dirección)
Sin embargo, los robots diminutos, de decenas a unos cientos de gramos y con capacidad para navegar por sí solos, tienen potencial para diversas aplicaciones, pues gracias a su poco peso, son extremadamente seguros, incluso si chocan accidentalmente con alguien.
Como son pequeños, pueden desplazarse por zonas estrechas y si se fabrican a bajo coste, pueden desplegarse en grandes cantidades para cubrir rápidamente una gran superficie.
"La estrategia de navegación propuesta, inspirada en los insectos, es un paso importante en el camino hacia la aplicación de robots autónomos diminutos en el mundo real", afirma Guido de Croon, quien añade: "La funcionalidad de la estrategia propuesta es más limitada que la que ofrecen los métodos de navegación más avanzados. No genera un mapa y solo permite al robot volver al punto de partida. Aun así, para muchas aplicaciones puede ser más que suficiente".
El investigador concluye con algunos ejemplos: "Para el seguimiento de existencias en almacenes o la vigilancia de cultivos en invernaderos, los drones podrían volar, recoger datos y volver a la estación base. Podrían almacenar imágenes relevantes para la misión en una pequeña tarjeta SD para su posterior procesamiento en un servidor, aunque no las necesitarían para la navegación propiamente dicha".
Fuente: https://www.agenciasinc.es/Noticias/Navegacion-de-diminutos-drones-inspirada-en-las-hormigas
* Todas las imágenes son externas copiadas de la publicación. Lo derechos pertenecen a sus propietarios. Se usan solo como referencia.